De testen van de motoren zijn in andere posts terug te vinden, over de accu's hebben Roel en ik ons laten informeren door de accuboer, die heeft ons een leen accu meegegeven om te testen. Helaas bleek deze loodaccu te zwaar te zijn, daarom hebben we onderzoek gedaan naar batterijpacks voor modelbouw. Hier hebben we de geschikte batterijpacks voor de hovercraft gevonden.
Alle sub- sub systemen hebben we al in Solidworks gemaakt, door veel te oefenen ben ik er vele malen beter in geworden, en heb ik ook een nuttige bijdrage hierin kunnen leveren. De sub- sub systemen hebben we geassembleerd tot sub systemen, en deze hebben we weer geassembleerd tot het hele systeem (V-model).
Ik heb onder andere de volgende sub- sub systemen gemaakt:
Thrust
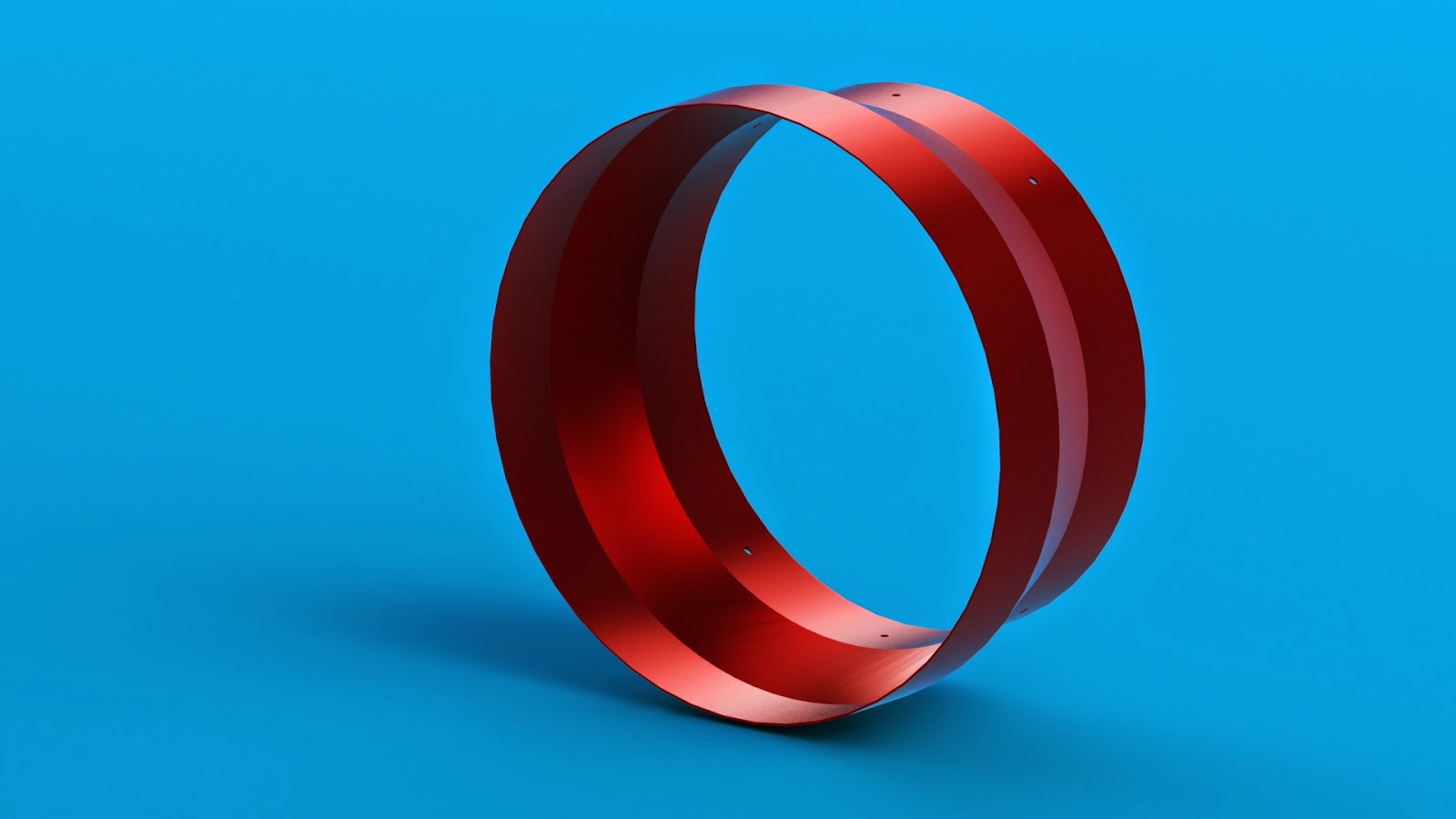
Venturi conisch
De motor wordt geplaatst in een conisch die een venturi-effect zal veroorzaken, hierdoor heeft de lucht die achter uit de conisch wordt geblazen meer snelheid, waardoor de hovercraft ook meer snelheid heeft. De conisch is gemaakt van aluminium om het gewicht te minimaliseren, ook is hij rood geverfd, dit is niet alleen om corrosie tegen te gaan, en een mooi kleurtje, maar ook om beter op te vallen op het water. Het stuursysteem is op de conisch bevestigd, net als de houder voor de motor, en het vogel afschrik systeem
Standaard venturi conisch
De conisch wordt gedragen door twee standaards van
aluminium, deze zullen door middel van boutverbindingen aan de conisch en de
bodemplaat worden bevestigd. De servo voor het stuursysteem zal tevens aan een
van de standaards worden bevestigd.

Thrustmotorhouder
deze houder wordt in de venturi conisch geplaatst, aan deze houder is de thrustmotor bevestigd.

Stuursysteem
Pennen flaps
De pennen zorgen dat de flaps kunnen schanieren, deze pennen
worden door het omgebogen gedeelte van de flaps gestoken. Op de uiteinden van de pennen wordt
schroefdraad gedraaid, zodat de pennen aan de conisch kunnen worden bevestigd.

Venturi busjes
Daar waar de pennen door de conisch komen worden onder en
boven busjes geplaatst. Deze zorgen ervoor dat de moeren die op de pennen
worden gedraaid volledig ondersteund worden, omdat ze anders tegen een schuin
vlak zouden zitten. Ook zorgen de busjes dat de flaps niet rechtstreeks tegen
de conisch aan zitten.




Liftsysteem
Liftmotor
De liftmotor heeft een spanning van kan tot een
spanning van 24 volt, en een stroomsterkte van 4 ampère. Omdat de batterijen
maximaal 22.2 volt kunnen leveren zal dit het maximum zijn dat de motor zal
krijgen. Met de hulp van collega studenten is de motor getest, de motor is op
een bodemplaat met rok geplaatst en aangezet. De motor gaf voldoende lift,
zelfs wanneer we er een gewicht van 7 kilogram aan toevoegden was er nog
voldoende lift.
Op de bodemplaat
Spacers
Deze spacers houden de twee bodemplaten van elkaar gescheiden en zorgen er tevens voor dat de rok gelijk matig opgeblazen wordt omdat ze de bodemplaat boven de grond houden in plaats van erop.
Accu lift
Deze accu heeft een spanning van 11,1 volt en een capaciteit
van 5000mAh. De accu is een li-po accu met 3 cellen en heeft een C waarde van 2
wat betekent dat er een maximaal maar 10000 mA getrokken mag worden. De accu
heeft een gewicht van 392 gram. Deze accu wordt gebruikt om de thrust aan te
sturen. De accu zou voldoende vermogen moeten leveren om de hovercraft met een
redelijke snelheid voor te duwen.

Accu thrust
Deze accu heeft een spanning van 22.2 volt en een
stroomsterkte van 2700 mA, en een capaciteit van 2700 mAh.
Ook deze accu is een Li-po accu maar deze accu heeft een C waarde van 25. De
accu bestaat uit 6 cellen en weegt 380 gram en wordt gebruikt om de lift aan te
drijven. De accu heeft genoeg vermogen om de accu van ongeveer een uur te laten
zweven en zorgt ervoor dat alle onderdelen op de plaat kunnen blijven staan
zonder dat dat invloeden heeft.

Het complete systeem ziet er zo uit:

Geen opmerkingen:
Een reactie posten